
Robots can be used wherever it is too dangerous for humans. Exploration missions in space are, therefore, inconceivable without robotic support. The interaction between humans and robots will play an even more important role in future missions.
With this in mind, researchers at the German Aerospace Center (DLR) are developing key technologies such as telepresence robotics for space exploration, including the Moon and Mars. This will allow robots on a distant planet to carry out tasks commanded by a human from a spacecraft in orbit.
The ‘Surface Avatar’ mission team at DLR has now demonstrated how this could work. Astronaut Frank Rubio, aboard the International Space Station, simultaneously controlled a small team of robots on Earth to accomplish a complex task, allowing them to act partially or fully autonomously as required.
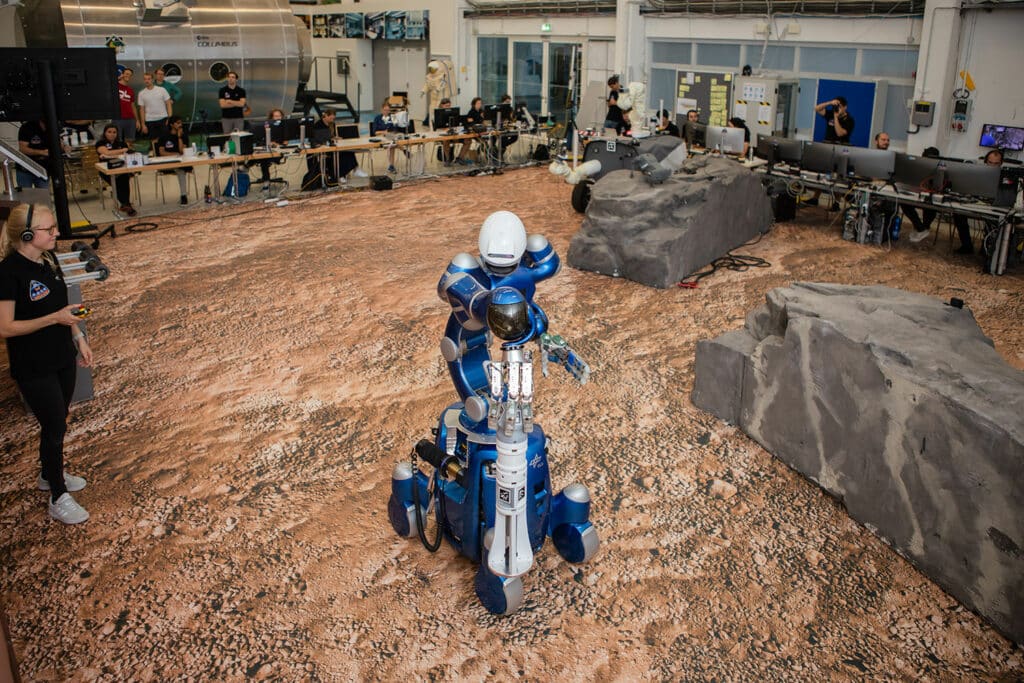
The two-hour telerobotics test took place in a simulated planetary environment in the German Aerospace Center, DLR, at Oberpfaffenhofen near Munich. During the test, Frank Rubio controlled three robots from the Columbus module of the ISS and was able to remove a seismometer from a lunar lander and place it on the ground to detect moonquakes. A DLR robotic lander arm was combined with DLR’s Rollin’ Justin humanoid robot and ESA’s four-wheeled, two-armed Interact rover.
In the test scenario, a stuck pin had to be removed from the lander before the seismometer could be positioned by Justin. Meanwhile, the Interact rover had been damaged by a quake during a surface sampling operation, so the sample still stuck in its gripper needed to be retrieved by Justin and placed on the lander.
Rubio could have a robot perform a task completely autonomously at the push of a button. But the astronaut could also take over the robot as an avatar and carry out individual steps as if with his own hand. For this purpose, he had the Robot Command Terminal (RCT) at his disposal, which combined three control elements.

On a screen, he could see what the individual robot saw at any time, control its movements with a joystick, and feel what the robot ‘felt’ thanks to an interactive device with force feedback.
The test was part of a wider ‘Surface Avatar’ series of tests. It opens the way to a follow-up Surface Avatar test with a larger team of robots, planned to be undertaken by Danish ESA astronaut Andreas Mogensen during his Huginn mission later this year.
Surface Avatar envisages at least three experiments at intervals of approximately six months. The robot team will also be joined by DLR’s ‘Bert,’ which can explore rough terrain with its dog-like body and four legs.
In the future, NASA and ESA operations will likely involve real scenarios. The idea is to have astronauts in orbit control these robots – to explore and take action on the Moon, then later other alien environments, without the cost and risk of landing.
“We are excited to be a step closer to giving astronauts and experts on Earth a wide range of possibilities to command and manage teams of different robots in space,” says Principal Investigator Neal Y. Lii from the DLR Institute of Robotics and Mechatronics, in the press statement. “We will be able to use our robots on the surface as their physical avatars and intelligent co-workers to execute ever more complex tasks.”