
For years, scientists have believed that oceans of water exist beneath the ice-covered surfaces on Saturn’s moon Enceladus and Jupiter’s moon Europa. The presence of water can suggest the possibility of the existence of life even in outer space, especially when water is present beneath an ice layer. However, it is a significant challenge to investigate such water bodies that are located kilometers below an ice sheet on Earth and even more so in outer space.
The TRIPLE-nanoAUV 2 project aims to develop high-technology tools capable of penetrating thick ice crust, exploring the underwater regions beneath them with appropriate scientific sensors, and retrieving samples without contaminating the ecosystem.
The collaborative project is being coordinated by researchers from the MARUM Research Facility at Germany’s University of Bremen, with company partners DSI Aerospace Technologie GmbH in Bremen and EvoLogics GmbH in Berlin. Along with the TRIPLE collaborative projects TRIPLE-GNC and TRIPLE-LifeDetect, the project is part of the DLR Explorer initiatives. TRIPLE stands for “Technologies for Rapid Ice Penetration and subglacial Lake Exploration.”
Once the three projects are completed, they will be tested jointly during a field trial under the Antarctic ice shelf near the Neumayer III Station in the spring of 2026. The encapsulated craft will have to melt its way down through up to 4,000 meters of ice to explore the water body.
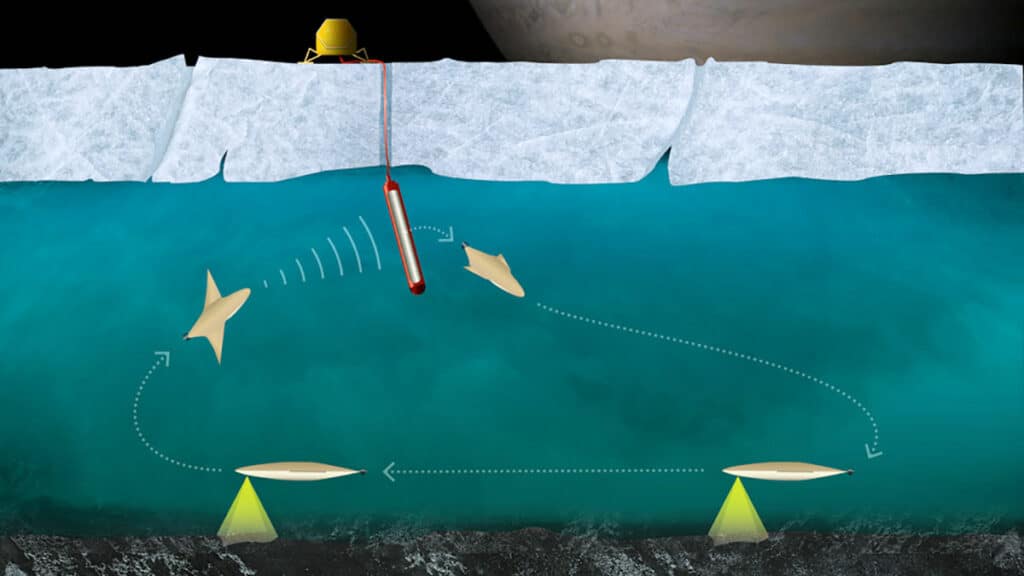
For this, a small Autonomous Underwater Vehicle (AUV) as well as an LRS (Launch and Recovery System) will be constructed at MARUM. The LRS will enable the nanoAUV to dock with an underwater station, where it recharges its batteries and transmits the collected data to Earth.
The vehicle will be much smaller than is usual for underwater vehicles, with a length of approximately 50 centimeters (20 inches) and a diameter of about 10 centimeters (4 inches). This small size is because it has to be transported through the ice as a payload within a melting probe.
“Such nano-vehicles can help to provide a better overall understanding of marine ecosystems,” says project leader Prof. Ralf Bachmayer of MARUM in an official statement. “The new autonomous system is unique and should make it possible in the future to study the global liquid-water ocean below the icy surfaces of Jupiter’s moon Europa and Saturn’s moon Enceladus. Miniaturization is the primary challenge in its development, with the probe dictating the overall size. In addition, all of the components must be able to withstand the high pressure underwater.”