
A team of students from ETH Zurich and ZHAW Zurich has designed and build a rover robot prototype based on animals like deer and antelope (Springbok) and how they move quickly in some circumstances. The robot called “SpaceBok” is a four-legged jumping robot designed for space exploration.
Off-world gravity is quite different from what we have on the Earth. The astronauts found themselves hopping around the lunar surface rather than simply walking. Jumping was an instinctive response to the low gravity there. It is easier for them because we humans have a natural balance. However, for bringing that capability in robots, it will require a meticulous design and built-in much like a spacecraft.
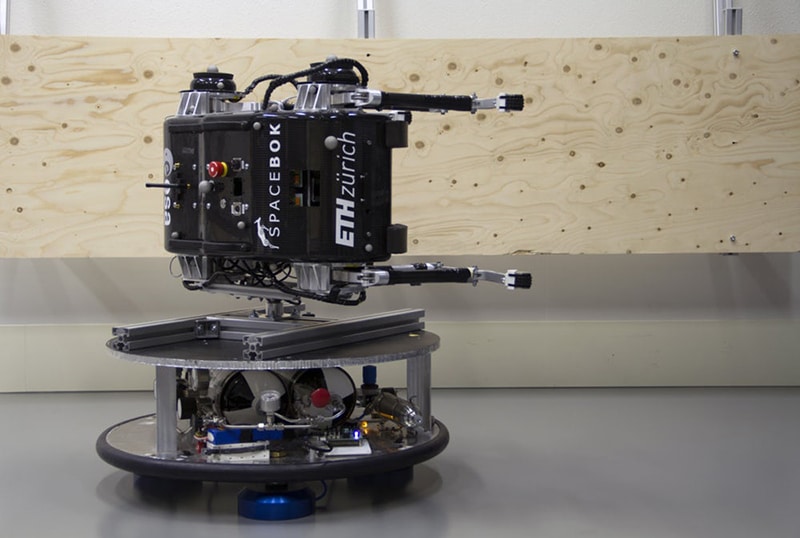
SpaceBok planetary exploration robot is designed to work better in such low-gravity environments, where jumping could be an efficient way of transportation. The robot could walk and jump up to 2 m (6.6 ft) vertically on the moon using its springy legs, although such a height poses new challenges. Once it comes off the ground, the quadruped robot needs to stabilize itself to come down again safely, like a mini-spacecraft.
“So what we’ve done is harness one of the methods a conventional satellite uses to control its orientation, called a reaction wheel. It can be accelerated and decelerated to trigger an equal and opposite reaction in SpaceBok itself,” explains team member Philip Arm.
Besides, the incorporated springs in its legs can store energy during landing and release it at take-off, significantly reducing the energy needed to achieve those jumps.
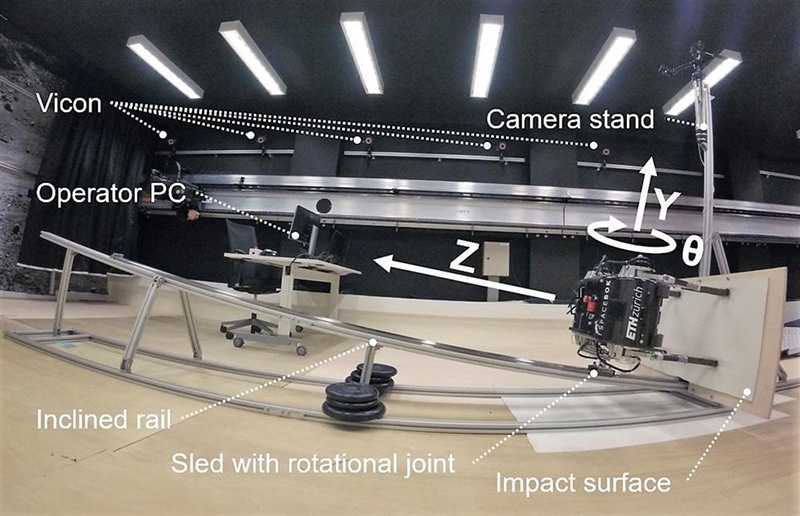
Swiss University students are testing SpaceBok at a European Space Agency facility. It is currently being tested using robotic facilities at ESA’s ESTEC technical center in the Netherlands.
Read more: Stanford Doggo, a four-legged bot can dance, backflip, jump and trot
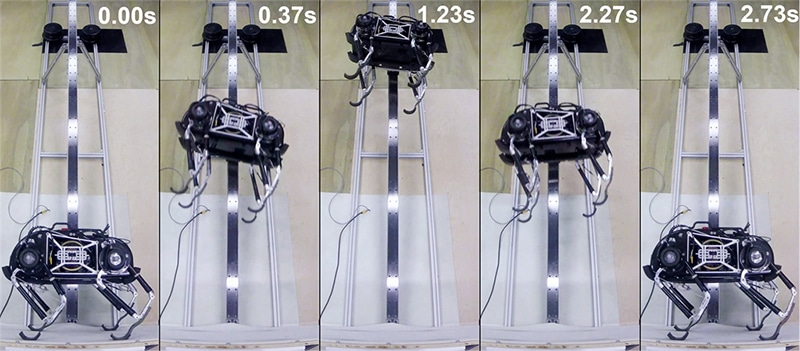
Until now, the team has managed to get the SpaceBok to make repetitive jumps to heights of up to 4.3 ft (1.3 m) under simulated lunar gravity. The researchers also have set up a test facility that simulates the moon’s gravity and let it practice its jumping skills. They were also able to use the bot like a Pong game, with two researchers bouncing it back and forth across the floor.
The team also explained that the testing would continue in more realistic conditions, with jumps made over obstacles, hilly terrain, and realistic soil, eventually moving out of doors.
This planetary exploration robot could explore not just the moon or Mars, but also extremely low-gravity asteroids, the team hopes.