
Unmanned aerial vehicles (UAVs), better known as drones, combine the advantages of both multi-copters and fixed-wing planes. Multi-copters are popular for their flight flexibility and stable hovering capabilities. Fixed-wing airplanes, on the other hand, are more energy-efficient during level flight, making them better vehicles for long-distance flight.
However, hybrid UAVs are rarely used because controller design is challenging due to its complex, mixed dynamics.
A team from MIT’s Computer Science and Artificial Intelligence Lab (CSAIL) has designed a new AI simulation platform that lets users create their own hybrid, fixed-wing drones. The user can develop drones of different sizes and shapes that can switch between hovering and gliding – all by using a single controller.
The platform simplifies the customization and design process for any hybrid drone. “Our method allows non-experts to design a model, wait a few hours to compute its controller, and walk away with a customized, ready-to-fly drone,” says MIT CSAIL grad student Jie Xu. “The hope is that a platform like this could make more these more versatile ‘hybrid drones’ much more accessible to everyone.”
In typical designs, drone experts need to design separate controllers for the helicopter flight mode, the plane flight mode, and a “transition mode” that lets pilots switch between the two. As a result, the system often needs to be designed manually and from scratch for every drone, which can be a difficult, expensive, and time-consuming process.
To skip this hassle of manually building three modes, researchers have turned to neural networks to compute a controller automatically. Teaching a machine how to fly is difficult. Most methods are tested in simulation but not on real hardware, which often leads to an unexpected interruptions.
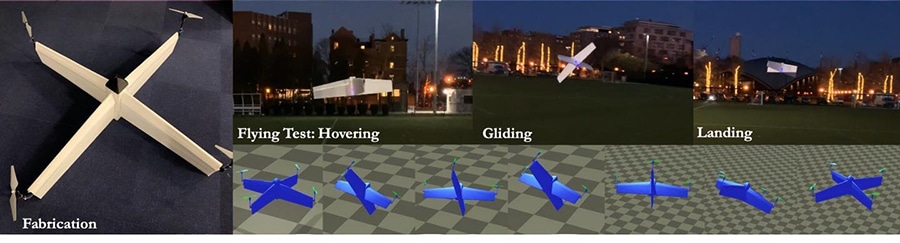
Whereas the researchers’ new neural-based controller design was trained by reinforcement learning techniques. In this system, users first design the geometry of a hybrid UAV by selecting and matching parts from a provided data set. The design is then used in a realistic simulator to compute and test the UAV’s flight performance automatically.
The algorithm is then applied to automatically learn a controller for the UAV to achieve the best performance in the high-fidelity simulation. The team successfully verified their method both in simulation and real flight trials.
In this research, the team delivers a novel model-agnostic method to automate the design of controllers for vehicles with vastly different configurations.
In future work, the team is planning to investigate how to increase maneuverability through improved geometry design. This will help perfect the flight performance of the UAV.
The team will present their novel computational controller design at SIGGRAPH 2019, held on 28 July-1 August in Los Angeles.