
There is a growing interest in developing ballistically launched small aircraft systems, for applications in both emergency response and space exploration. But the operation of multirotor in crowded environments requires a highly reliable takeoff method, as failures during takeoff can damage more valuable assets nearby.
Now, a team of researchers from Caltech University and NASA’s Jet Propulsion Laboratory has presented a prototype for a football-shaped foldable quadrotor that gets fired out of a cannon, unfolds itself, and then flies off. The ballistically launched foldable multirotor is called SQUID, short for Streamlined Quick Unfolding Investigation Drone.
It is possibly the first ball-shaped drone that is launched by an automatic baseball pitcher, which has been properly adapted to work as a propelling device. The propellant system resembles the logic of cannonballs to overcome some of the challenges related to drone launching.
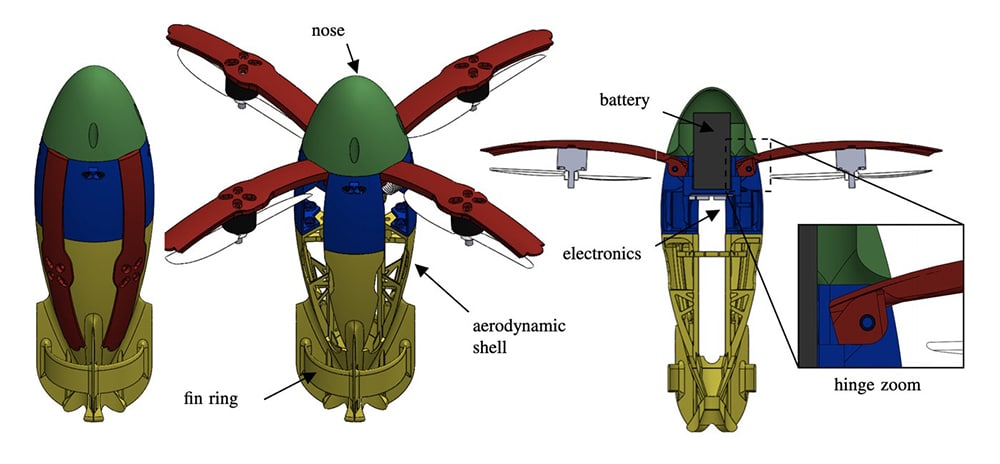
The SQUID has a weight of 530 grams (18 ounces) and measures 27-inches long and eight inches in diameter. It has four spring-loaded rotor arms that snap into place in less than a tenth of a second after the drone is launched. SQUID gets its initial boost of 15 meters per second from a pneumatic baseball pitching machine, which gives the drone an apex of about 10 meters.
As the drone exits the launcher, a nichrome wire heats up and burns through a monofilament line holding the arms in place. The arms, driven by springs, snap out in just 70 ms, while the aerodynamic body of the drone passively orients it into the airstream.
The team also noted that SQUID’s rotors start running around 200 ms after the launch. SQUID then automatically orients itself into a hovering attitude, and it can be controlled just like a normal quadrotor within less than 1 second of launch.
As noted in IEEE Spectrum, the researcher team is currently working on both smaller (2-inch diameter) and larger (6-inch diameter) prototypes. The 6-inch prototype will be large enough to carry a battery and payload, enabling significantly more autonomy with stabilization.