
The Korea Advanced Institute of Science and Technology (KAIST) has announced the development of RaiBo, a robotic dog that can walk robustly with agility even in deformable terrain such as a sandy beach.
We all know that walking in sand requires a greater effort than walking on a hard surface. One of the reasons for this is that the feet sink into the sand unpredictably at different depths, and this requires the muscles to work harder to propel you forward for the next step. Safe locomotion on such soft surfaces is even more difficult for a robot that constantly has to adapt its movements based on sensor data.
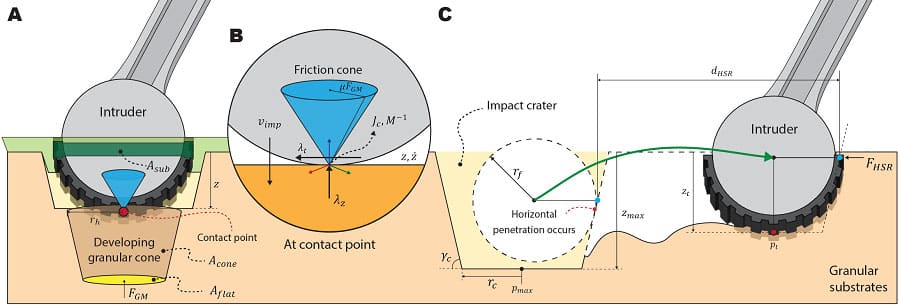
The research team led by Professor Jemin Hwangbo of the Department of Mechanical Engineering has therefore developed a technology to model the force received by a walking robot on the ground made of granular materials such as sand and simulated it via a quadrupedal robot. The team also worked on an artificial neural network structure that is suitable for making real-time decisions needed in adapting to various types of ground without prior information while walking and applied it to reinforcement learning.
The trained neural network controller is expected to expand the scope of application of quadrupedal walking robots by proving its robustness in changing terrain, including the ability to move quickly and to walk and turn on soft surfaces like an air mattress or sand without losing balance.
Reinforcement learning is an AI learning method used to create a machine that collects data on the results of various actions in an arbitrary situation and utilizes that set of data to perform a task. Due to the enormous amount of data needed for reinforcement learning, the method of collecting data through simulations that approximate physical phenomena in the real environment is widely used.
The research team also developed an artificial neural network structure that implicitly predicts ground characteristics by using a recurrent neural network that analyzes time-series data from the robot’s sensors. They equipped the robot dog RaiBo with a suitably trained controller and let the robot run on a soft sandy beach. The robot automatically adapted its walking to the terrain characteristics.
During the tests, RaiBo reached a speed of 3.03 m/s on a sandy beach where the robot’s feet were completely submerged in the sand. The team also tested the robot on harder grounds, such as grassy fields and a running track; it was able to run stably by adapting to the characteristics of the ground without any additional programming or revision to the controlling algorithm.
The simulation and learning methodology developed by the research team is expected to contribute to robots performing practical tasks as it expands the range of terrains that various walking robots can operate on.
“It has been shown that providing a learning-based controller with a close contact experience with the real deforming ground is essential for the application to deforming terrain,” said Suyoung Choi, the first author of the study. “The proposed controller can be used without prior information on the terrain, so it can be applied to various robot walking studies.”
Journal reference:
- Suyoung Choi, Gwanghyeon Ji, Jeongsoo Park, Hyeongjun Kim, Juhyeok Mun, Jeong Hyun Lee, Jemin Hwangbo. Learning quadrupedal locomotion on deformable terrain. Science Robotics, 2023; DOI: 10.1126/scirobotics.ade2256