
Many celestial bodies in the solar system that are potentially interesting for future exploration missions, such as the moons of Saturn and Jupiter, Enceladus and Europa, as well as the polar regions of Mars, contain significant amounts of water ice. Space exploration is a very complicated task due to the long distances, and since sending a human being is not always the best option, NASA has been betting much more on the different robots.
However, finding the necessary resources to keep robots running in extreme environments is the bigger problem. The power problem has been solved pretty well, often leveraging solar power because we can find it almost anywhere. You can’t make wheels out of solar power, but you can make wheels, and other structural components, out of another material that can be found just lying around all over the place – ice.
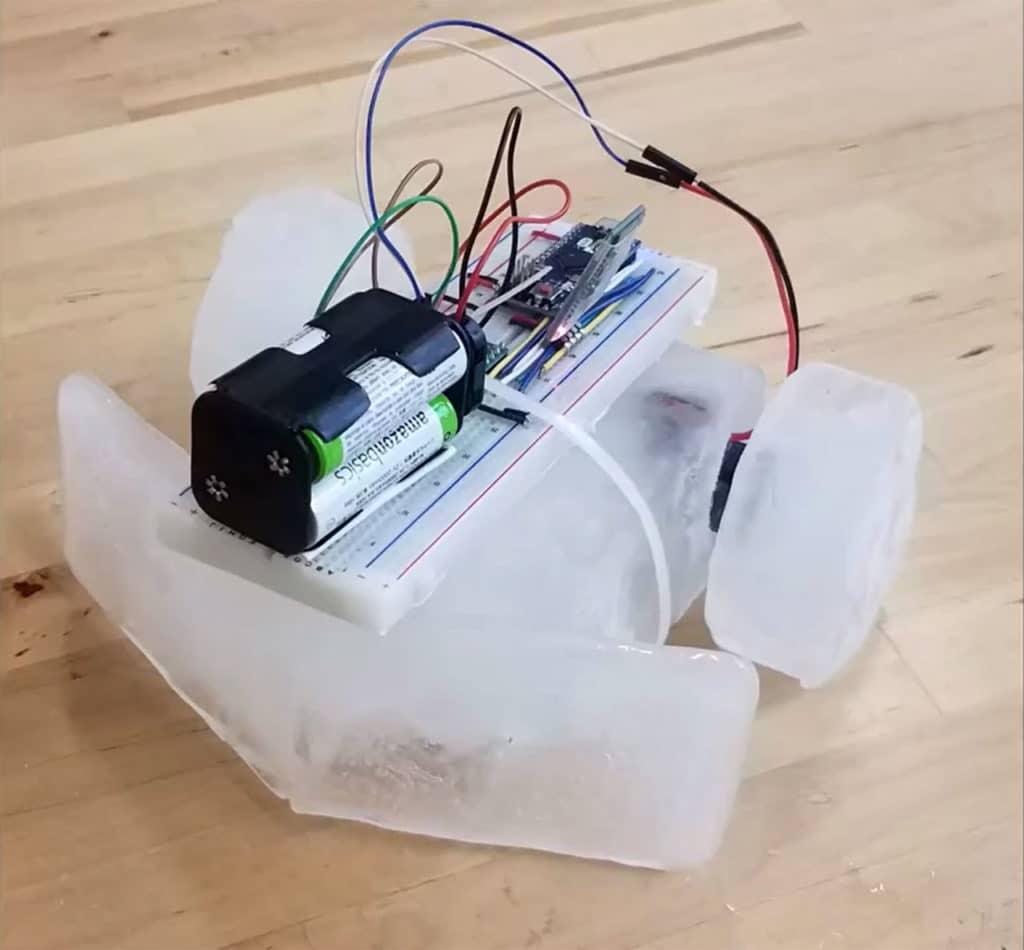
Devin Carroll and Mark Yim from the GRASP Lab at the University of Pennsylvania in Philadelphia decided to study the possibility of using this material in the construction of robots and built created a prototype of a two-wheeled robot out of ice. The robot made entirely of ice capable of self-repairing and rebuilding using local ice when landing on other planets. The invention has been presented at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) in the form of a simple and interesting ice machine called the IceBot that could be part of the future of space exploration.
The goal is to develop a concept for robots that can exhibit self-reconfiguration, self-replication, and self-repair. “The ice allows for increased flexibility in the system design, enabling the robotic structure to be designed and built post-deployment after tasks and terrain obstacles have been better identified and analyzed,” the two authors write in their paper.
The dimensions of the two-wheeled IceBot are 14 × 20 × 13 cm, and its weight is 6.3 kg. At temperatures below zero (tests took place at -17 degrees Celsius), the robot can confidently move on a flat ice surface with an inclination of 2.5 degrees remains indispensable for research.
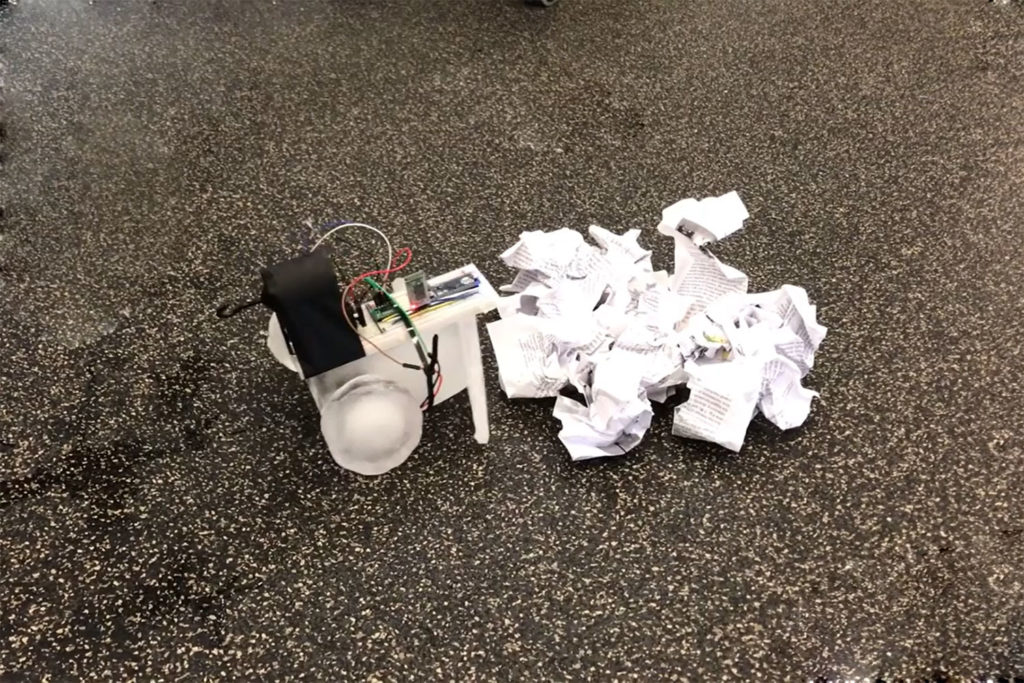
Modern space robots sooner or later fail, and their launch into orbit is too expensive. The issue of equipment is also acute since such an advanced system is not intended for repair. The creators of IceBot got around this problem in an original way: the novelty can restore its structure using ice. At the moment, the robot could move around and not immediately fall to pieces even at room temperature.
The main problem when creating a prototype of the ice bot, according to the developers, was the difficulty of working with ice at room temperature, since every 15 minutes, they had to return the material back to the freezer; otherwise, it would deform, which affected its further stability. The robot would be operating in an environment with ice all over the place, where the ambient temperature is cold enough that the ice remains stable, and ideally also cold enough that the heat generated by the robot won’t lead to an inconvenient amount of self-melting or an even more inconvenient amount of self-shorting.
IceBot is a proof-of-concept Antarctic exploration robot, and there is still a long way to go for a device of these characteristics to be valid for space exploration. The engineers are now busy creating the module needed to connect the drives with blocks of ice. If their efforts are successful, the IceBot will deliver maximum durability with minimum energy use.