
Jellyfish may not be efficient swimmers, but they have been proven to be one of the most energy-efficient swimmers. This quality of the jellyfish can be used to design bioinspired underwater vehicles to improve the way machines operate in and interact with aquatic environments.
With the same thinking, researchers from the Institute of Automation, Chinese Academy of Sciences in Beijing, China, have developed a robotic jellyfish that may someday autonomously explore the ocean depths.
Jellyfish in nature swim by jet propulsion, radially expanding and contracting their bell-shaped bodies to push water behind them. Most of the underwater robots that previously had been made using this technique had to be tethered to a surface-located power source and control system.
To address this problem, researchers designed a free-swimming jellyfish-like robotic system to perform three-dimensional jellyfish-like propulsion and maneuvers based on a reinforcement learning-based method.
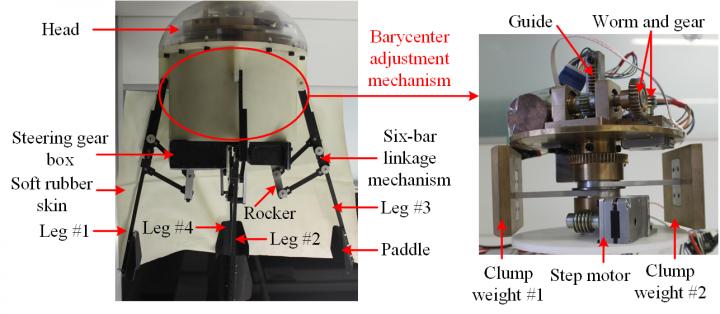
Robotic jellyfish modeled after Aurelia aurita (commonly known as moon jellyfish), is hemispherical in shape and consists of a bell-shaped rigid head, along with a cylindrical body underneath. It incorporates four separate six-bar linkage mechanisms and is covered in a soft rubber skin.
Read more: The UX-1a, an autonomous underwater robot that explores abandoned mines
The robotic jellyfish is about 138 mm tall and weighs about 8.2 kg. Besides, to enhance the maneuverability of the machine, a barycenter adjustment mechanism is assembled inside the cavity. The forward motion is achieved by bending and straightening those mechanisms, causing the body to push out water as it expands and contracts. Moreover, the robot is able to work both vertically and horizontally by moving two weights located in the cavity of its body.
Researchers are now developing a reinforcement learning-based attitude control method that would allow the robot to learn which weight movements result in which changes in direction. Using onboard sensors, the robot can move through the water on a given path while avoiding obstacles without human control. It could also carry small payloads, such as environmental sensors, while doing so.