
The development of new spacesuits is a critical component of achieving NASA’s goals of returning humans to the Moon, continuing safe operations on the International Space Station (ISS), and exploring Mars and other deep-space locations. Current spacesuits are cumbersome and metabolically expensive.
Now, Texas A&M engineers are developing the SmartSuit, a new spacesuit architecture that would create a safer and better spacesuit environment for Extravehicular Activity (EVA) on planetary surfaces. Proposed by Ana Diaz Artiles, assistant professor in the Department of Aerospace Engineering at Texas A&M University, along with a graduate student Logan Kluis, the spacesuit architecture focuses on three key improvements to the current suit design; increased mobility, enhanced safety, and informed interaction between the environment and the astronaut.
“The current spacesuit has been designed for microgravity conditions; in these conditions, astronauts don’t need to walk or move around using their lower body, they typically translate themselves using their upper body,” said Diaz Artiles. “Now, when you are on a planetary surface, astronauts are going to need to walk, bend, kneel, pick up rocks and many other similar activities that require a better mobility in the lower body.”
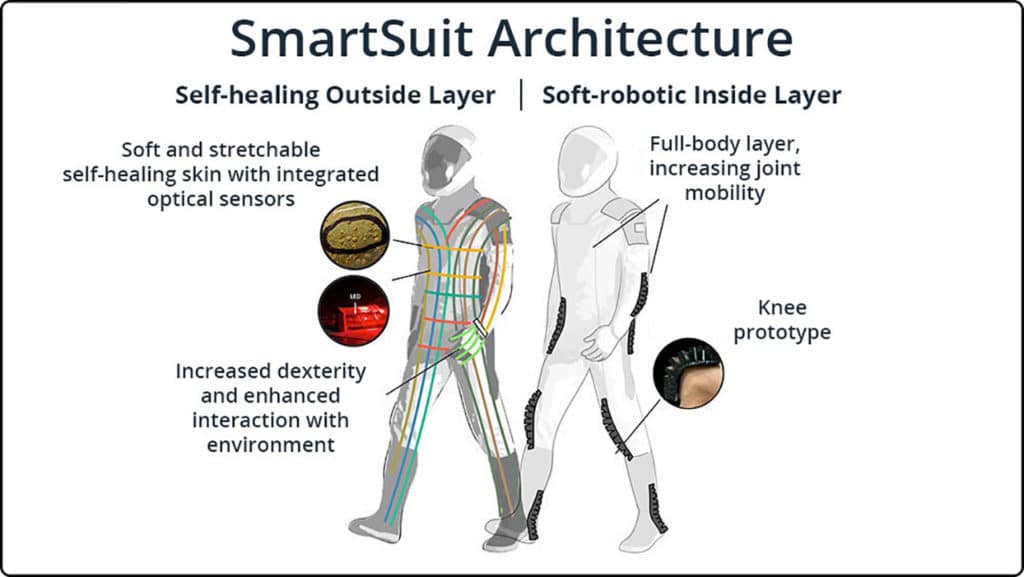
So, the engineers have developed a prototype soft-robotic knee that uses gas pressure to expand the internal chambers so that they push against each other. As each one expands, the actuator bends. By using a soft material, the actuator forms to the human body, creating a more comfortable fit and potentially reducing the risk of injury. Engineers say soft-robotics would allow the actuators to conform to the astronaut’s body, greatly increasing their comfort compared to more rigid hard surface actuators.
The recent SmartSuit architecture is focused on actuators for knee joints. Ultimately, their objective is to integrate actuators into a full-body layer, enhancing motion in several body joints. That layer would press relatively hard against the astronaut, providing extra mechanical counterpressure (MCP), which increases mobility. The team believes that the energy spent moving against the current suit contributes to the metabolic cost, which the assistive robotic actuators would be able to reduce by 15%.
“Pressure and mobility have an inverse relationship,” Diaz Artiles said. “The more pressure you have in the spacesuit, the lower the mobility. The less pressure you have, the easier it is to move around.”
“Imagine wearing really tight Under Armour or really tight leggings. That pressure pushing down on your body would be in replace of or in addition to gas pressure,” Kluis said. “So the idea with the SmartSuit is that it would use both mechanical pressure and gas pressure.”
Diaz Artiles and her team continue to work on the SmartSuit architecture, and the actuator prototypes are a promising development in creating a more accommodating and resourceful spacesuit for future planetary missions. Their end goal would be for it to feel like the wearer is moving without the spacesuit on and without breaking too much of a sweat.