
The University of California Berkely has now showcased yet another version of its one-legged jumping robot Salto, a robot that was first shown in 2016. The engineers taught the one-legged Salto-1P robot to land at the planned point with greater precision and stop without falling.
Initially, Salto was able to make impressive hopes and even move in this way. However, until now, there has been no way to stop the robot as far as the operator did not catch it while doing one of its jumps.
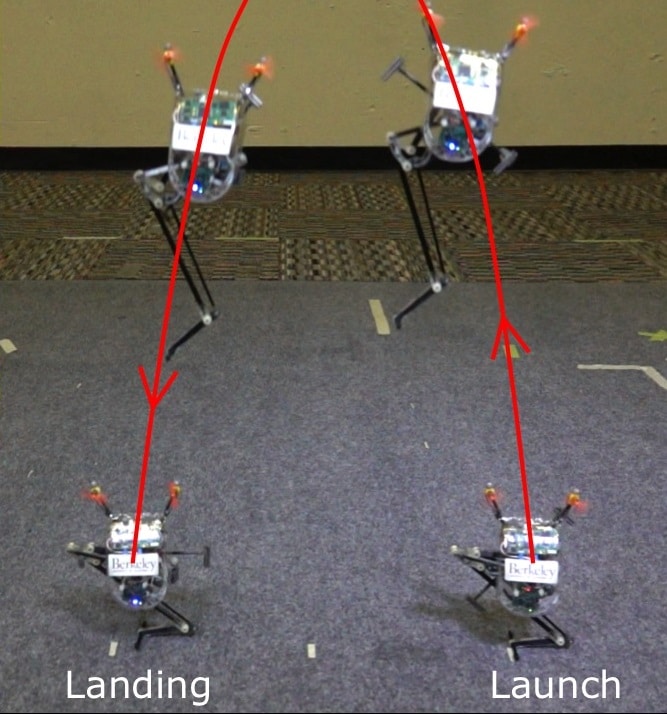
Credits: UC Berkeley
The modern version of the Salto-1P manages its jumps and landing position with a three-section foot with an electric motor at the base, a flywheel on its side, and two side screws. This allowed the small, single-leg hopping robot to accurately calculate its jumps and jump over objects with different heights. Now, it is also possible to determine more or less exactly where the robot will land, something that is handled by letting the robot leave the ground at different angles as it jumps away.
In addition, the developers finalized the calculations of the level of leg springiness at the time of landing, as well as the calculation of the angle at the start of the jump. According to IEEE Spectrum, the robot has been able to reduce the standard deviation from its landing target from 9 cm all the way down to 1.6 cm, meaning that it can now handle small targets like tree branches.
The best control over the angle of inclination during landing allowed the robot to stop and perform several exact jumps in a row, which would be difficult to achieve without the possibility of stopping.