
Most animals on Earth have evolved a robust locomotion system using legs that provides them with a high degree of mobility over a wide range of environments. Inspired by animal locomotion, many-legged robots have recently been developed to achieve agile locomotion in various environments.
However, legged robots are susceptible to falling and leg malfunction during locomotion. The use of a large number of legs, as in centipedes, can overcome these problems. But it makes the body long and leads to many legs being constrained to contact with the ground to support the long body, which impedes maneuverability. Also, controlling a large number of joints so the robot can transverse complex environments requires huge computational and energy costs.
Inspired by agile locomotion in biological systems, researchers from the Department of Mechanical Science and Bioengineering at Osaka University have developed a biomimetic “myriapod” robot that takes advantage of a natural instability – that can convert straight walking into curved motion – to navigate. By changing the flexibility of couplings, the centipede-like robot can be made to turn without the need for complex computational control systems.
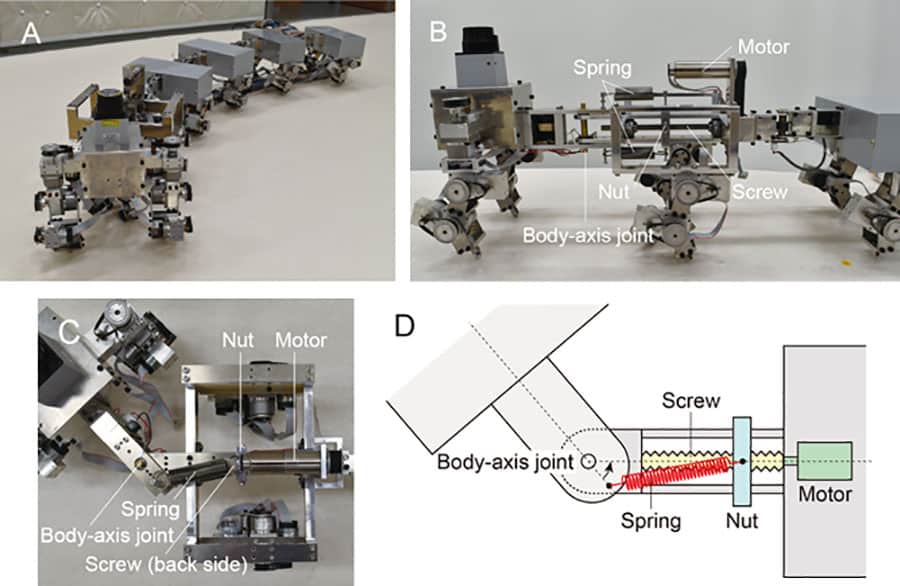
The myriapod robot consists of six segments with two legs connected to each segment and flexible joints. The robot is 53 in (135 cm) in length and weighs 9.1 kg. The flexibility of the couplings can be modified with motors during the walking motion using an adjustable screw.
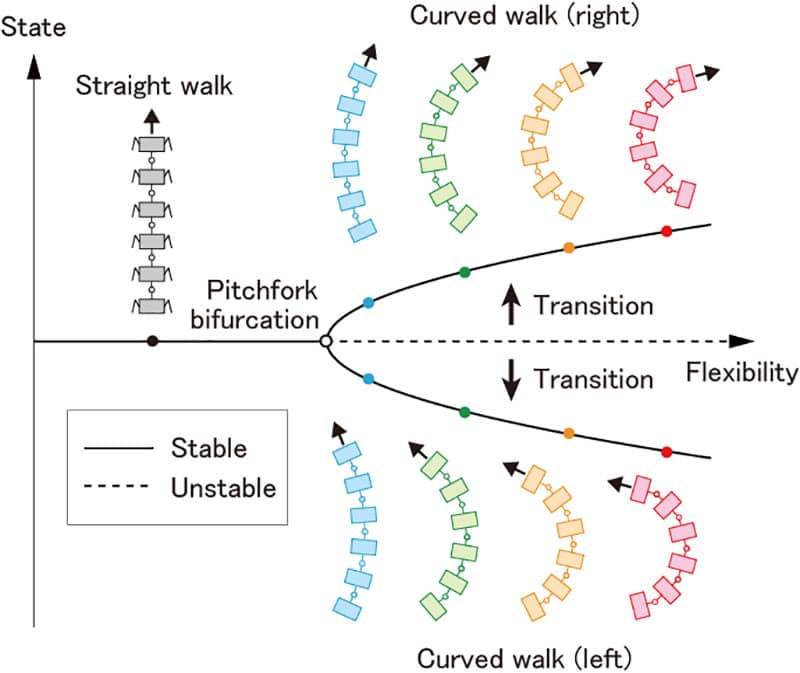
The researchers found that increasing the flexibility of the joints led to a “pitchfork bifurcation,” in which straight walking becomes unstable. Instead of correcting the instability, the researchers ran with it, allowing the robot to walk in a curved pattern, either to the right or to the left.
“We were inspired by the ability of certain extremely agile insects that allows them to control the dynamic instability in their own motion to induce quick movement changes,” says Shinya Aoi, an author of the study.
Researchers found that not directly steering the movement of the body axis but rather controlling its body-axis flexibility can greatly reduce both the computational complexity as well as the energy requirements.
The team tested the centipede robot’s ability to reach specific locations and found that it could navigate by taking curved paths toward targets. Future versions may include additional segments and control mechanisms.
Researchers foresee applications in a wide variety of scenarios, such as search and rescue, working in hazardous environments, or exploration on other planets.
Journal reference:
- Shinya Aoi, Yuki Yabuuchi, Daiki Morozumi, Kota Okamoto, Mau Adachi, Kei Senda, and Kazuo Tsuchiya. Maneuverable and Efficient Locomotion of a Myriapod Robot with Variable Body-Axis Flexibility via Instability and Bifurcation. Soft Robotics, 2023; DOI: 10.1089/soro.2022.0177