
Humans often use Multi-contact locomotion to keep balance, but now it seems that the robots are also learning this valuable skill.
Roboticists from the Technical University of Munich (TUM) have developed the humanoid robot LOLA and have been using it as a research platform for algorithm development for more than a decade. They have recently given their humanoid robot some major upgrades to make multi-contact locomotion possible.
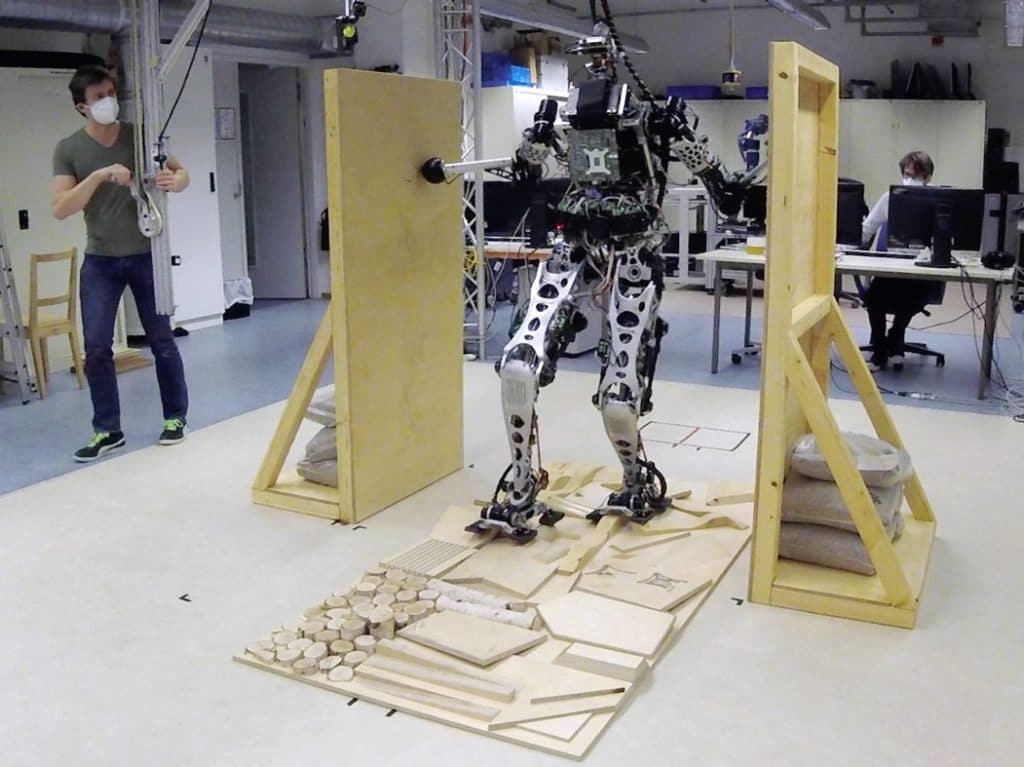
LOLA is an electrically actuated humanoid with 26 distributed joints, 68 kilograms total weight, and 176cm height. The robot has a classic design with arms, legs, and one head. Its 26 electrically actuated joints are driven by brushless DC motors. The robot has a pair of depth cameras installed in its head, allowing it to draw up a volumetric map of the surrounding space.
The new algorithm uses a proactive rather than reactive approach in multi-point contact stabilization. It allows the robot to adapt its behavior dynamically to its environment. This includes, on the one hand, the use of multiple contacts during fast locomotion, i.e., additional hand support for stabilization, as well as the improvement of kinematic capabilities through clever control of the degrees of freedom and partial surface contacts on the other hand.
How the humanoid Robot LOLA performs various multi-contact maneuvers can be seen in the video below. Here, the robot is technically blind, not using any camera-based input. In the video, you can see different scenarios, in one of which the robot lost its balance due to a slipped plate under its foot but was able to stay upright precisely due to the support from its hands.
Although it’s still in its early stages, it’s already some of the most human-like bipedal locomotion we’ve seen. For now, the ability for LOLA to use its arms isn’t fully automated. For these experiments, the navigation module is disabled; thus, the foothold positions and hand contact points are manually set according to the current environment setup. But in the future, they hope these techniques will be done autonomously.
The researchers note that some of the most challenging parts, such as using multiple contact points dynamically for the balance of the moving robot, are being performed onboard the robot in real-time.