
Engineers at Northwestern University in Illinois have developed the smallest-ever remote-controlled walking robot that comes in the form of a tiny, adorable peekytoe crab. Just a half-millimeter wide, the tiny crab can bend, twist, crawl, walk, turn and even jump without hydraulics or electricity.
The research team comprised students across varying academic levels who combined critical- and creative-thinking skills to design millimeter-sized robots that looked like crabs as well as other animals like inchworms, crickets, and beetles. Although the research is at an exploratory stage at this point, the researchers believe their technology might bring the field closer to realizing micro-sized robots that can perform practical tasks inside tightly confined spaces.
Smaller than a flea, the robotic crab is not powered by complex hardware, hydraulics, or electricity. Instead, its power lies within the elastic resilience of its body.
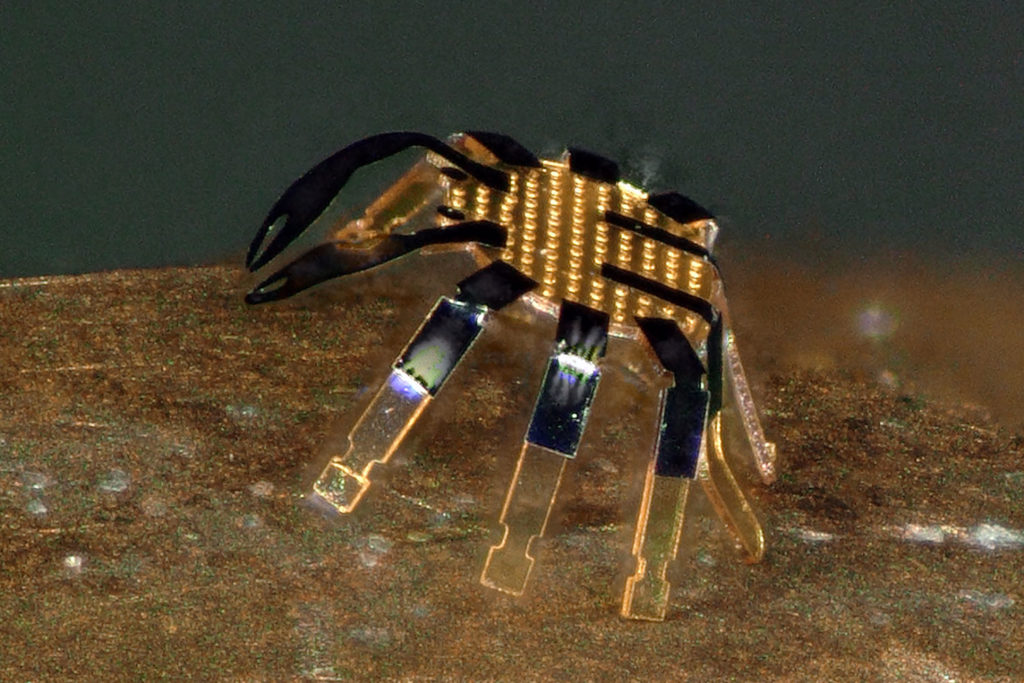
The crab robot is made of a shape-memory alloy material that transforms into its remembered shape when heated. The researchers used a scanned laser beam to rapidly heat the robot at different targeted locations across its body. A thin coating of glass elastically returns that corresponding part of the structure to its deformed shape upon cooling.
As the robot changes from one phase to another – deformed to remembered shape and back again – it creates locomotion. The laser remotely controls the robot to activate it, and the laser scanning direction also determines the robot’s walking direction. Because these structures are so tiny, the rate of cooling is very fast, researchers explained. In fact, reducing the sixes of these robots allows them to run faster.
“Robotics is an exciting field of research, and the development of microscale robots is a fun topic for academic exploration,” said John A. Rogers, who led the experimental work. “You might imagine micro-robots as agents to repair or assemble small structures or machines in industry or as surgical assistants to clear clogged arteries, to stop internal bleeding or to eliminate cancerous tumors – all in minimally invasive procedures.”
To manufacture such a tiny critter, the researchers first fabricated precursors to the walking crab structures in flat, planar geometries. Then, they bonded these precursors onto a slightly stretched rubber substrate. When the stretched substrate is relaxed, a controlled buckling process occurs that causes the crab to “pop up” into precisely defined three-dimensional forms. With this manufacturing method, the Northwestern team could develop robots of various shapes and sizes.
So why a peekytoe crab? “With these assembly techniques and materials concepts, we can build walking robots with almost any size or 3D shapes,” Rogers said. “But the students felt inspired and amused by the sideways crawling motions of tiny crabs. It was a creative whim.”