
Robots have traditionally been tied to a certain morphology during their operational lifetime, which is limited only to the adoption of their control strategies.
Scientists at the Norway’s University of Oslo have developed a four-legged robot that can adjust the length of its legs to adapt the body to the surface.
Named DyRET, the Dynamic Robot for Embodied Testing, the robot is described as the first quadruped robot that is able to automatically adapt its morphology to different conditions in unstructured outdoor environments. The self-learning robot uses a mix of sensors, cameras, and artificial intelligence to change the body shape means that it adjusts the length of the legs for that particular surface.
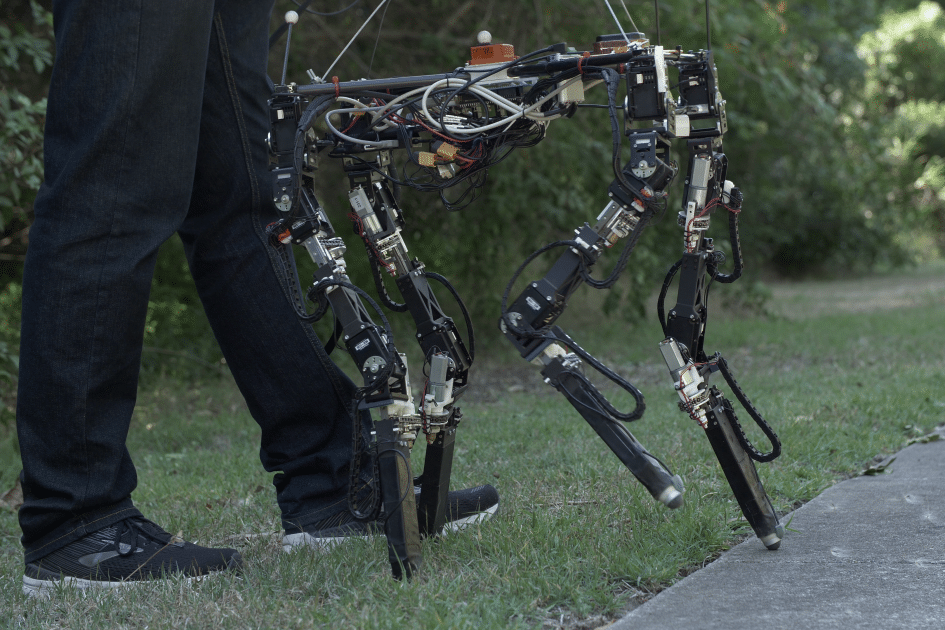
DyRET uses a camera to see how rough the terrain is, and it uses sensors in the legs to feel how hard the walking surface is. “The robot continuously learns about the environment it’s walking on and, combined with the knowledge it gained indoors in the controlled environment, uses this to adapt its body,” says lead researcher Tønnes Nygaard.
Researchers explored two ways for DyRET to learn the best leg configuration for different situations: first on known surfaces such as gravel, sand, and concrete and then on the grass outside. It quickly learned how to walk on the Australian grass and what was the ideal leg length.

A flat lawn may not be the biggest of challenges, but the team says that the grass in nature is full of tufts and holes that can trap a long-legged robot, so DyRET will shorten its legs. On concrete, it can stretch the legs and “run” away. “Shorter legs give better stability, while longer legs allow for a higher walking speed if the ground is sufficiently predictable,” says associate professor Kyrre Glette.
This is beneficial in environments where the robot might face many unexpected challenges. This includes search and rescue operations but also agriculture, where there is a wide range of challenging surfaces and weather conditions. It could also be useful in the exploration of mines where it is difficult for people to get to.
“Using our technology, the robot is able to adapt to one of its legs becoming weaker or breaking. It can learn how to recover, whether through limping or decreasing the length of the other three legs“, Nygaard says.
The team has released all parts of the project as open-source. They also hope that this idea that one can change the body shape will sound convincing to other researchers and that it may be incorporated into other types of robots.