
Today’s motorized prosthetic hands have limited functionality. They are difficult to use, as the users have to focus on controlling things constantly.
To overcome this problem, scientists from EPFL research institute, Switzerland are developing a new technology for improved control of robotic hands – that could be a life-changing device for amputees. They are working on a new artificial robotic hand that merges individual finger control and automation for improved grasping and manipulation.
The team developed an algorithm that learns how to decode user intention and translates it into finger movements of the prosthetic hand. The setup incorporates muscular-activity-detecting sensors which are placed on the amputee user’s residual arm stump.
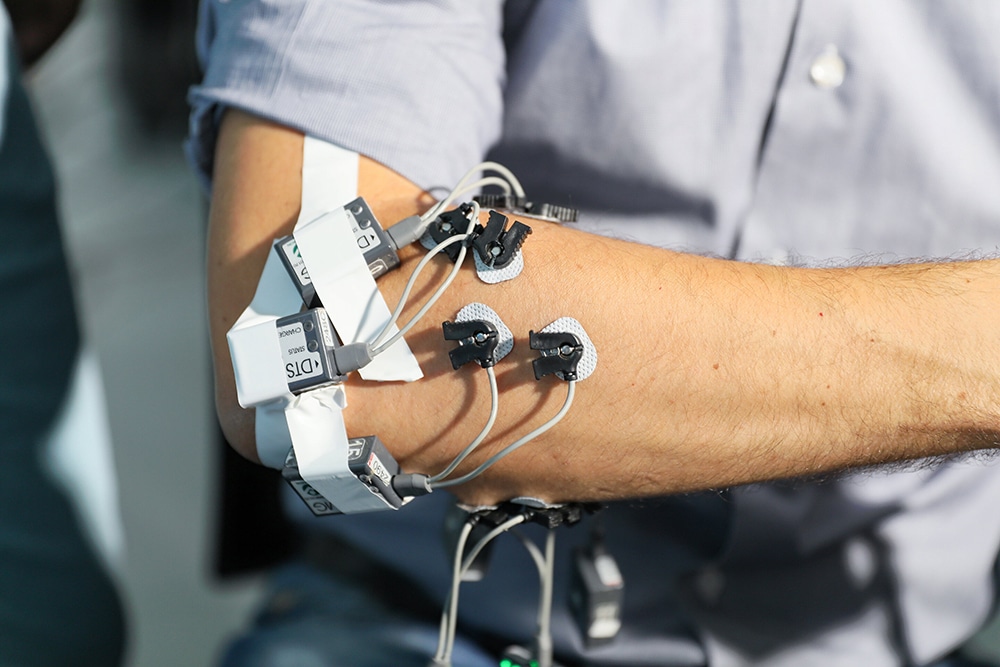
These sensors detect intended finger movement from the muscular activity, and the algorithm learns which hand movements correspond to which patterns of muscular activity.
After initial training with a series of hand movements, this algorithm can be used to control individual fingers of the prosthetic hand. Coupled with robotics, it enables the artificial hand to grasp, hold, and strengthen that grasp.
The team engineered the algorithm so that robotic automation kicks in as soon as the user tries to grasp an object. It tells the hand to close its fingers when the object comes in contact with the sensors. And if it detects that an object is slipping from the hand, the computer system responds within 400 milliseconds by further tightening the grip.
For now, the algorithm is still being tested. Also, there are several challenges remain to engineer the algorithm before it can be implemented in a commercially available prosthetic hand for amputees.